▷ Practice 37: Using two core of ESP-32
⭐⭐⭐⭐⭐ Practice 37: Using two core of ESP-32
- ➡️ #TSCLab #TCLab #ESP32 #Arduino #Control #PWM #PID #Matlab #RPM #HTTP #MQTT #OTA #Telegram #FireBase #NodeRed
- ✅ Source TSC-LAB: www.tsc-lab.blogspot.com
- ✅Github Repositories
- ⭐When using this resource, please cite the original publication:
General objective:
- Multitask with the two cores of the ESP32.
Materials:
- TSC-Lab


Introduction:
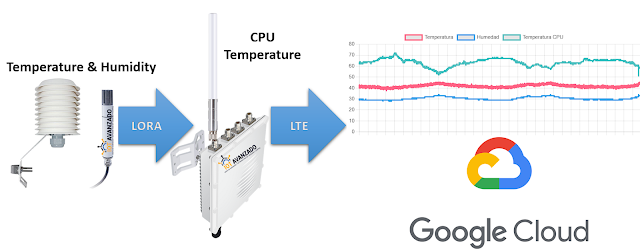
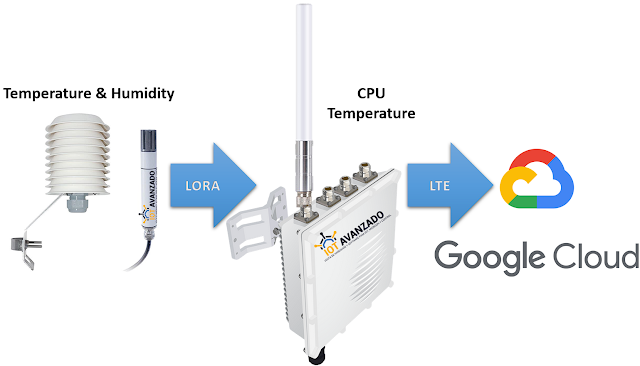
The ESP-32 has 2 32-bit Xtensa LX6 microprocessors called core 0 and core 1. By default, the code runs on core 1. However, in this laboratory practice, you will learn how to utilize the dual-core of the ESP-32 by performing multitasking, working with both the temperature plant and the motor speed simultaneously.
Steps:
Note: It is assumed that all libraries have been previously installed.
⭐ Practice repository: https://github.com/vasanza/TSC-Lab/tree/main/Practice34
2- In the serial monitor, you will see something similar to this:

Read related topics
- ✅ USB DATA ACQUISITION - OPEN LOOP (Temperature Control Lab)
- Initial setups and tests
- Ambient temperature reading using sensor 1 and 2
- Activation of Transistor 1 and Reading of temperature sensor 1 and 2
- Activation of Transistor 2 and Reading of temperature sensor 1 and 2
- Activation of Transistor 1 and 2, also Reading of temperature sensor 1 and 2
- ✅ USB DATA ACQUISITION - OPEN LOOP (Speed Control Lab)
- Initial setups and tests (ON/OFF)
- Speed control using PWM
- Motor direction control and Speed control
- Encoder Implementation (RPM)
- Data acquisition with square velocity input
- ✅ MATLAB DATA ACQUISITION (USB)
- ✅ SYSTEM IDENTIFICATION (Matlab)
- ✅ SISO PID CONTROLLER DESIGN (Matlab)
- ✅ CLOSED-LOOP WITH CONTROLLER IN MATLAB (*)
- ✅ IOT PLATFORMS (*)
- Wifi connection
- ThingSpeak (HTTP)
- FireBase (HTTP)
- Firebase data collection (HTTP)
- Over-The-Air programming (OTA)
- NodeRed (USB)
- NodeRed (Wifi)
- NodeRed (HTTP) + Telegram
- NodeRed (HTTP) + ThingSpeak
- ✅ MQTT DATA ACQUISITION
- ✅ CLOSED-LOOP WITH CONTROLLER IN ESP32
- ✅ MORE POWERFUL APPLICATIONS








Comentarios
Publicar un comentario