▷ #PID control for angular position based on #FPGA
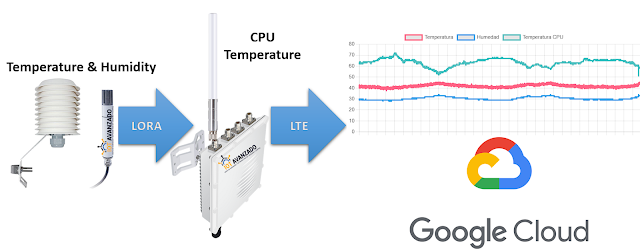
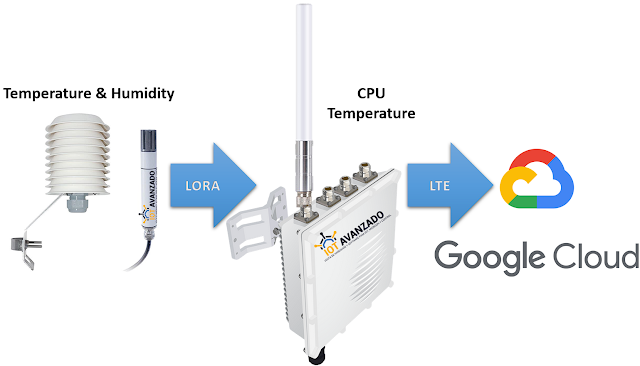
⭐⭐⭐⭐⭐ Sensor networks for agriculture based on #FPGA

- ➡️ #DigitalSystems #DigitalElectronic #DigitalCircuits #HDL #VHDL #FPGA
- ⭐ https://github.com/vasanza/MSI-VHDL
✅ Objectives:
- Adquirir señales de dos fotorresistencias #LDR situadas en un panel fotovoltaico.
- Controlar la posición angular del panel fotovoltaico hasta que el valor de las dos #LDR sean iguales.
- Medir los tiempos de procesamiento, % de #CPU utilizado y % de memoria utilizada, en el procesador #NIOSII, #ARM ó ambos, según sea el caso (radar chart).
✅ Goals:
- Implementar un Sistema Embebido basado en #FPGA con la capacidad de mover un panel fotovoltaico y sea capaz de almacenar las lecturas de dos fotorresistencias en memoria Double Data Rate 3 Synchronous Dynamic Random-Access Memory #DDR3_SDRAM, el acceso se lo realizará a través del Hard Processor System #HPS. El proceso de ajuste de los parámetros proporcional, integral y derivativo del controlador PID podrá ser realizado en computador convencional utilizando herramientas de identificación de sistemas, luego el modelo del controlador en lenguaje C++ deberá ser ejecutado por el procesador NIOSII en la #FPGA. El sistema deberá tener como salida un monitor #VGA ó #HDMI que muestre las RPM del motor vs setpoint de forma clara y en tiempo real. El sistema basado en #FPGA es quien ejecuta los bloques de cálculo de #RPM y controlador PID, pero los grupos que tengan estudiantes de telemática, no usarán la salida #VGA ó #HDMI sino deberán acceder a la interfaz visual por medio de una aplicación web desplegada en un servidor de aplicaciones web corriendo en un sistema operativo linux con procesador #ARM.
✅ Abstract:
- Para que el controlador #PID sepa hacia donde debe mover el motor, realiza una comparación entre la lectura de dos fotorresistencias #LDR y empezará a mover el motor hasta que la lectura de estas #LDR sean iguales. El controlador #PID recibe como entrada el error entre el LDR1 - LDR2 y mediante los parámetros proporcional, integral y derivativo genera la señal de control para hacer que el motor mueva el panel fotovoltaico hasta que el valor de las #LDR sea igual. La señal de control que genera el controlador #PID deberá ser en modulación por ancho de pulso #PWM para poder controlar la velocidad del motor mediante un driver [1].
✅ Reference :
✅ Hardware:
- (1) #DE10_Standard o #DE10_Nano
- (1) Monitor VGA / HMDI
- (2) LDR, (1) motor driver y (1) motor DC
✅ Database:
✅ Expertos: dcortez

- Leer temas relacionados:
- ⭐ Projects Digital Systems Design #FPGA
- ✅ Introduction
- ✅ Programming
- ✅ #Proteus #PCB Design
- ✅ Paper: Monitoring of system memory usage embedded in #FPGA
- ✅ Embedded System Projects
- ➡️ End Device #Arduino #FreeRTOS
- ➡️ End Device + Coordinator #Raspberry Pi #Python
- ➡️ #Proteus #PCB Design
- ✅ TinyOS for sensor networks #XBEE
- ✅ Electronic Prototype Development using #ALTIUM #CircuitMaker
- ✅ Instalación de #ALTIUM #CircuitMaker y especificaciones del módulo #ESP32
- ✅ Microcontrollers Application using #Labview
- ✅ Práctica 1: Salidas Digitales #Arduino








Comentarios
Publicar un comentario